1. Data kode/ pseudorange
Pseudorange
(pengukuran jarak dengan data kode) merupakan pengukuran jarak berdasarkan korelasi antara kode yang dipancarkan oleh satelit dengan replika kode yang dibuat oleh receiver. Jarak
tersebut diperoleh dengan cara mengukur waktu penjalaran sinyal GNSS dari satelit
ke antena penerima/receiver. Waktu penjalaran sinyal ditentukan melalui
analisis korelasi antara kode yang telah tersimpan pada perangkat penerima dan
sinyal GNSS.Pengukuran jarak dengan kode memungkinkan penyajian posisi secara
instan, walaupun ketelitiannya lebih rendah jika dibandingkan dengan
menggunakan data fase.
Prosedur penentuan jarak dengan data kode
(pseudorange), kita mengasumsikan bawasanya jam receiver dan jam satelit
sinkron secara sempurna satu sama lain ( Note : Proses
sinkronisasi yang dilakukan oleh receiver tidaklah sempurna dan masih
mengandung beberapa kesalahan). Ketika sinyal (PRN/ Pseudo-Random Noise code)
ditransmisikan dari satelit dan diterima oleh receiver, receiver memproduksi
replika kode yang diterima, kemudian receiver membandingkan kode yang diterima
dari satelit dengan replikanya dan kemudian menghitung selisih waktu /selang
waktu sinyal merambat dari satelit ke receiver. Setelah mendapatkan selang
waktu , untuk mendapatkan jarak dari satelit ke receiver kita tinggal
mengalikannya dengan cepat rambat cahaya/ gelombang elektromagnetik.

Gambar 1. Penentuan jarak dengan kode
Sumber : Slide PPT Perkuliahan
2. Data fase
Prinsip penentuan jarak dengan data fase yaitu dilakukan dengan menggeser fase yang dihasilkan oleh penerima untuk melacak fase yang diterima. Secara sederhana, pengukuran fase pembawa menghasilkan jarak fase. Jarak fase sendiri merupakan jumlah gelombang penuh yang teramati dari satelit menuju penerima/receiver. Selama proses tersebut berlangsung, jumlah gelombang penuh dari sinyal pembawa tidak dapat ditentukan pada awal pemancaran sinyal, yang lumrah disebut sebagai ambiguitas fase. Kendati demikian, apabila ambiguitas fase tersebut dapat ditentukan secara tepat melalui beberapa pendekatan, seperti pendekatan LAMBDA (Teunissen, et al., 1995).
Jarak yang terukur merupakan hasil penjumlahan antara gelombang penuh (cycles) yang terukur dengan nilai fraksional gelombang terakhir (saat diterima receiver) dan gelombang awal (saat dipancarkan oleh satelit) yang kemudian dikalikan dengan panjang gelombangnya (lambda). Jarak yang ditentukan dengan prinsip pengukuran data fase lebih teliti dibandingkan dengan jarak yang ditentukan dengan menggunakan data kode karena resolusi data fase jauh lebih kecil dibandingkan dengan resolusi data kode. Hal lain yang membuat jarak fase lebih teliti dibandingkan dengan psedorange dapat dilihat dari Noise (1% dari panjang gelombang) pada pseudorange untuk kode P(Y) memiliki Noise 0.3m dan kode C/A 3m sedangkan jarak fase untuk L1 memiliki Noise 1.9 mm dan L2 memiliki Noise 2.4 mm. Sama halnya jika dilihat dari efek multipath untuk pseudorange kode P(Y) 30 m dan kode C/A 300m sedangkan untuk jarak fase L1 4.8 cm dan L2 6.1 cm. Sehingga dari data tersebut kita dapat menyimpulkan alasan mengapa jarak yang ditentukan dengan prinsip pengukuran data fase lebih teliti dibandingkan dengan jarak yang ditentukan dengan menggunakan data kode.
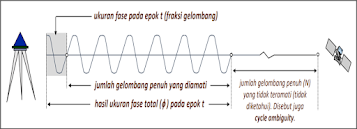
Gambar 2. Penentuan jarak dengan fase
Sumber : Slide PPT Perkuliahan


